MIT 6.S91 Introduction Deep Learning Notes
·2 mins
Table of Contents
1.Introduction to Deep learning #
- 震撼,第一节课直接放大招,用自己拍摄的视频和奥巴马合成来介绍这门课程。
- 不管老师在课程上讲什么,希望你们能真正的思考为什么这一步是重要而且必须的,正是这些思考才能做出真正令人惊讶的突破。
2.Deep Sequence Model #
Three way to solve gradient vanish
- Gated Cells
- LSTM
- Forget
- Store
- Update
- Output
- LSTM
- Attention [[Transformer]]
3.Deep Computer Vision #
- 介绍卷积操作,是一种提取特征的方法生成feature maps(还有其他的方法可以用吗?然后效果还不错);
- 与全连接相比的优点;
- Fast RCNN用于目标检测,怎么实现推荐特定区域图像?
- 医学图片分割
- 总结:
- 原理
- CNN架构
- 应用
4.Deep Generative Models #
- what 目标: 来自于一些分布中的训练样本,通过这些样本学习模型来表征这个分布;
- how 密度估计;神经网络适合来进行高维度表征;
- why
- Debiasing: Capable of uncovering underlying features in a dataset
- Outlier detection: how can we detect when we encounter something new or rare?
- Latent variable representation:
- 举例事物的投影,只能看见影子即表象,而被灯光照射的实物是看不见的即隐变量;要做的是通过观察到的投影来对实物进行建模
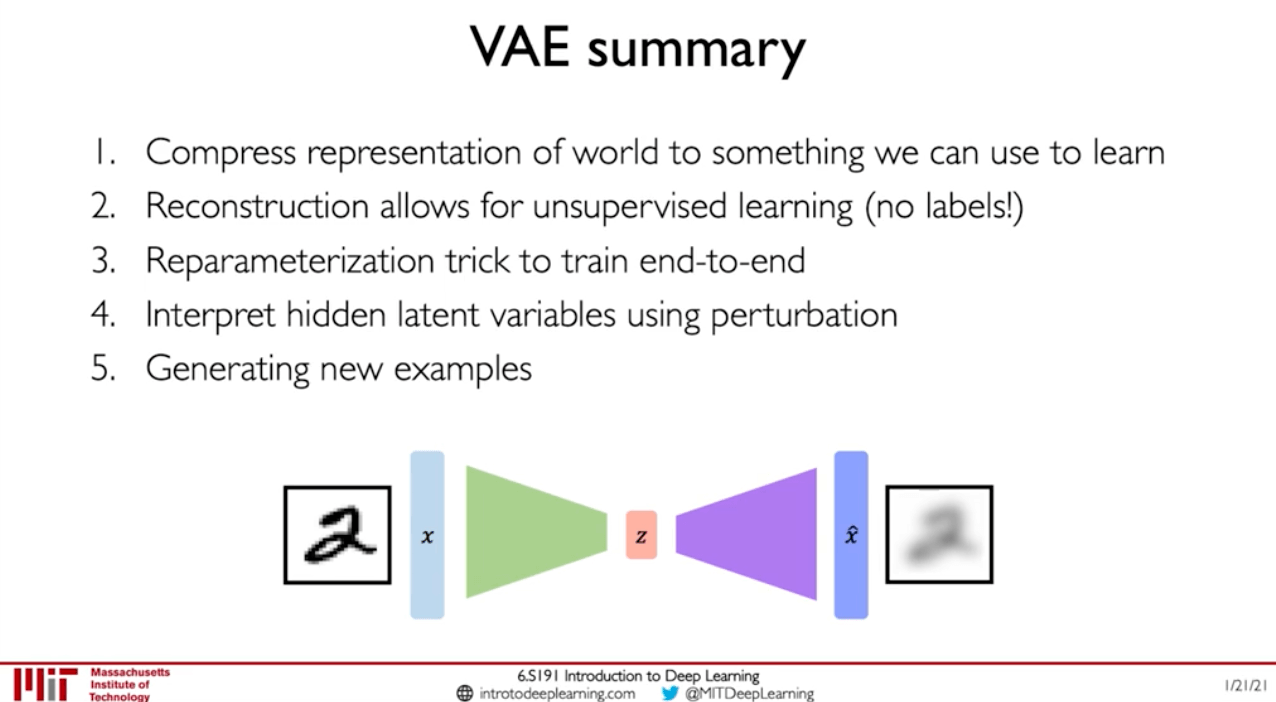
- Autoencoder: reconstruction loss
- 完全是确定性性
- VAEs:normal prior + regularization
- reconstruction loss + regularization term
- encoder: $q_\phi(z|x)$
- decoder: $p_\theta(x|z)$
- KL-divergence: $D(q_\phi(z|x)||p(z))$
- GANs
- make a generative model by having two neural networks compete with each other
- ⭐️CycleGAN: domain transformations 视频开头的视频就是用这个合成
5.Deep reinforcement learning #
- Reward: $$R_t = r_t + \gamma r_{t+1} + \gamma^2 r_{t+2} + …$$
- Q-function: expected total future reward $$Q(s_t, a_t) = E[R_t|s_t, a_t]$$
- Policy: to infer the best action to take at its state, choose an action that maximizes future reward $$\pi^*(s)=\mathop{\arg\max}\limits_{s}Q(s, a)$$
- Value Learning
- find $Q(s, a)$
- $a = \mathop{\arg\max}\limits_{a}Q(s, a)$
- Police Learning
- find $\pi(s)$
- sample $a\sim\pi(s)$
- Deep Q Network(DQN)
- Policy Gradient
- AlphaGo
6.DL Limitations and New Frontiers #
- limitations
- Generalization
- data is important
- Uncertainty in Deep learning
- adversarial attack
- Algorithmic Bias
- Generalization
- Frontiers
- encoder
- many real world data cannot be captured by standard encodings
- GCN(Graph Convolutional Networks)
- Automated AI
- encoder
7. LiDAR for Autonomous Driving #
@INNOVIZ
- Camera Vs LiDAR
- 互补,视线不好的情况
- 冗余能保证准确
- Safety and Comfort
8. Automatic Speech Recognition #
@Rev
- Conformer
- CTC
9. AI fore Science #
Principled AI Algorithms for challenging domains @Caltech
10. Uncertainty in Deep Learning #
longer version:NeurIPS 2020 Tutorial @Google AI Brain Team
- Return a distribution over predictions rather than a single prediction
- Out-of-Distribution Robustness
- covariate shift: distribution of features changes
- open-set recognition: new classes may appear at test time
- label shift: distribution of label changes
- sources of uncertainty
- Model uncertainty
- 认知上的不确定性
- Data uncertainty
- human disagreement label noise
- measurement noise
- missing data
- Model uncertainty
- how to compute
- BDN
- GP
- Deep Ensemble
- MCMC
- multi-input and multi output(MIMO)
- how to communicate with uncertainty?
7-10讲很一般,一个复杂的主题,需要将背景讲清楚,公司讲东西也没啥具体细节。